
Week 13: Prototyping A Friendly Hand
This week I picked up my paper hand again and made it friendly. Beyond automating it, I focused on incorporating an input for the servo motor to turn gradually.
① Incorporating Light Sensor into Paper Hand
After building two successful prototypes, I decided to revisit my Arduino-based project—the paper hand. I had some lingering hesitation around this prototype, mainly because I wasn’t yet sure how it would relate to nature. But I chose to move forward anyway, focusing first on overcoming the technical challenges.
I just had a feeling that this hand could be a metaphor for something—though I wasn’t quite sure how to explain it at the time.
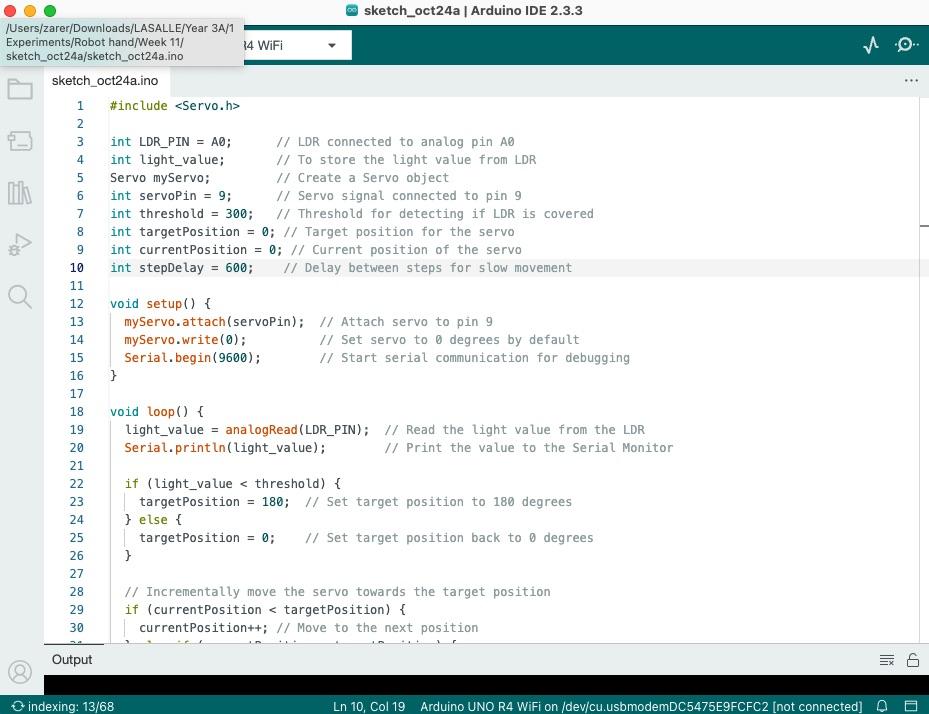
Arduino Sketch for LDR as input and Servo Motor as output 24 Oct 2024
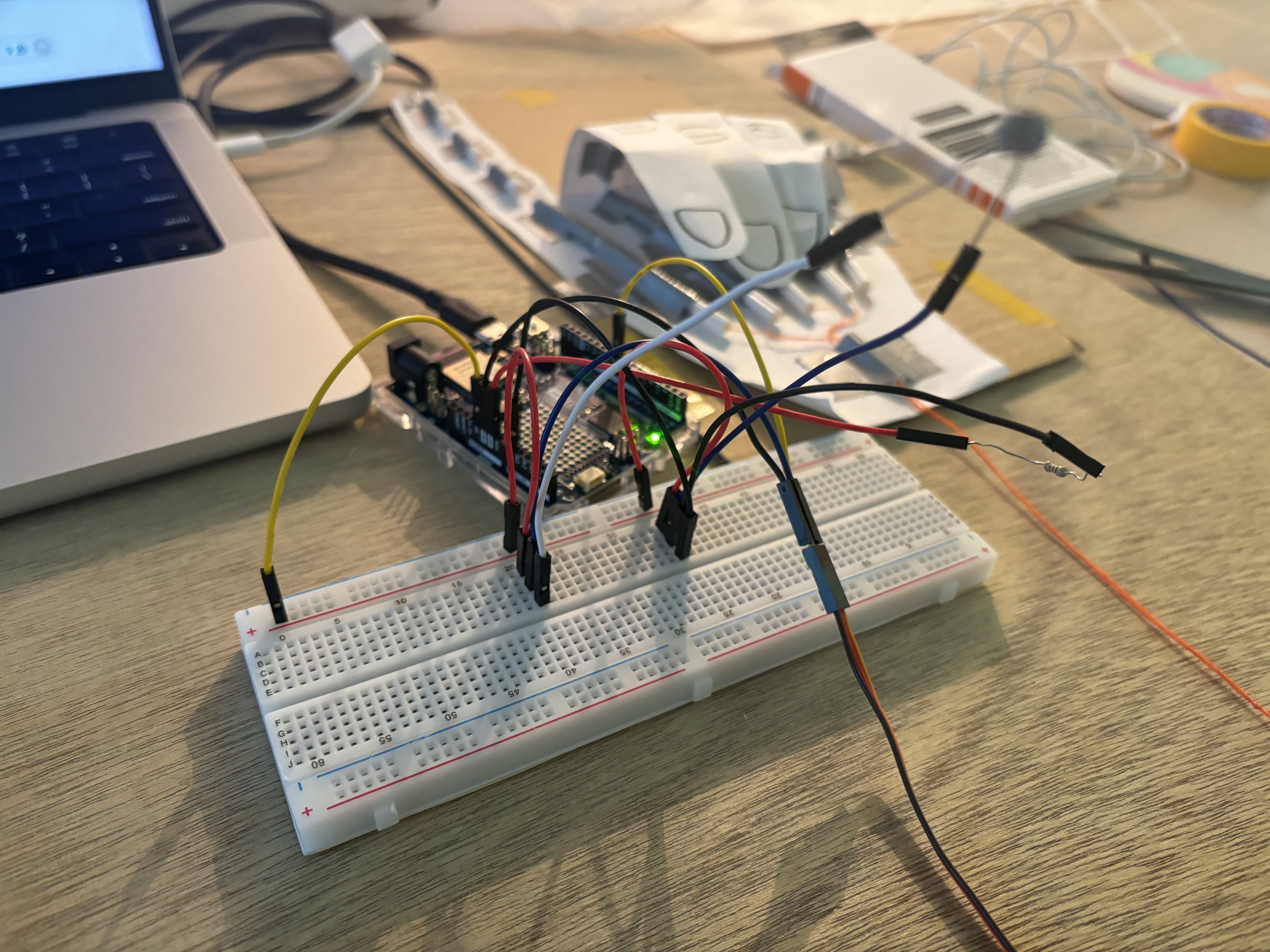
Set up 24 Oct 2024
-
Test 24 Oct 2024
② Integrating Light Sensor with Suction Cup
While browsing See Yourself Sensing, a book in my repository, I chanced upon Tim Hawkinson’s project Emoter , in which he used suction cups to secure an LDR to a screen-based light source.
It was likely an artistic innovation aimed at optimising the integration of LDR readings with an actuator. Adapting this concept, I developed my own technical solution to enhance responsiveness and control.
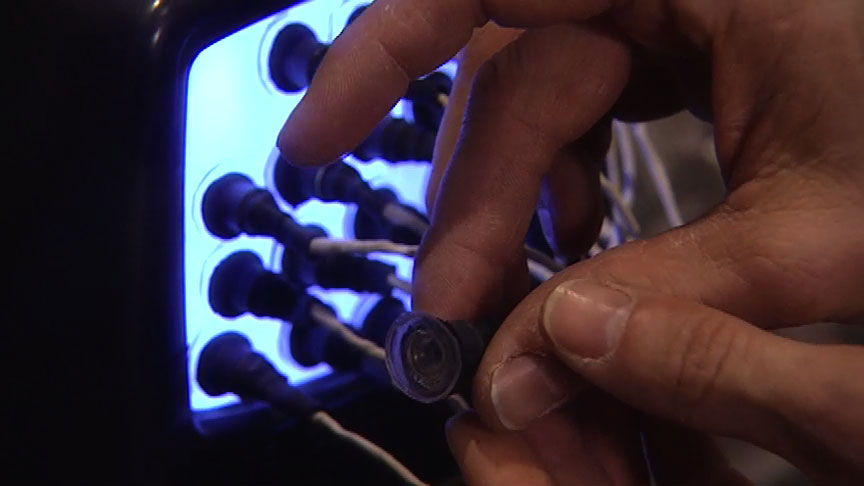
Emoter by Tim Hawkinson Light Sensor stucked to a screen
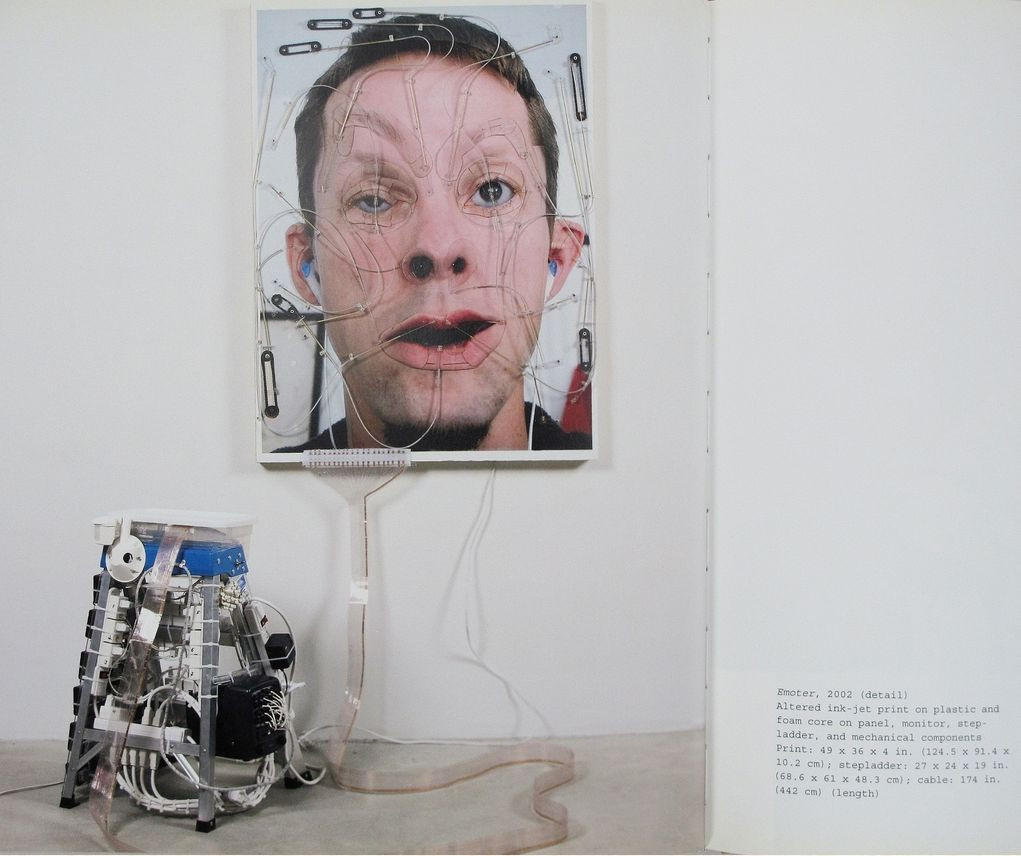
Emoter by Tim Hawkinson2000, Sculpture
-
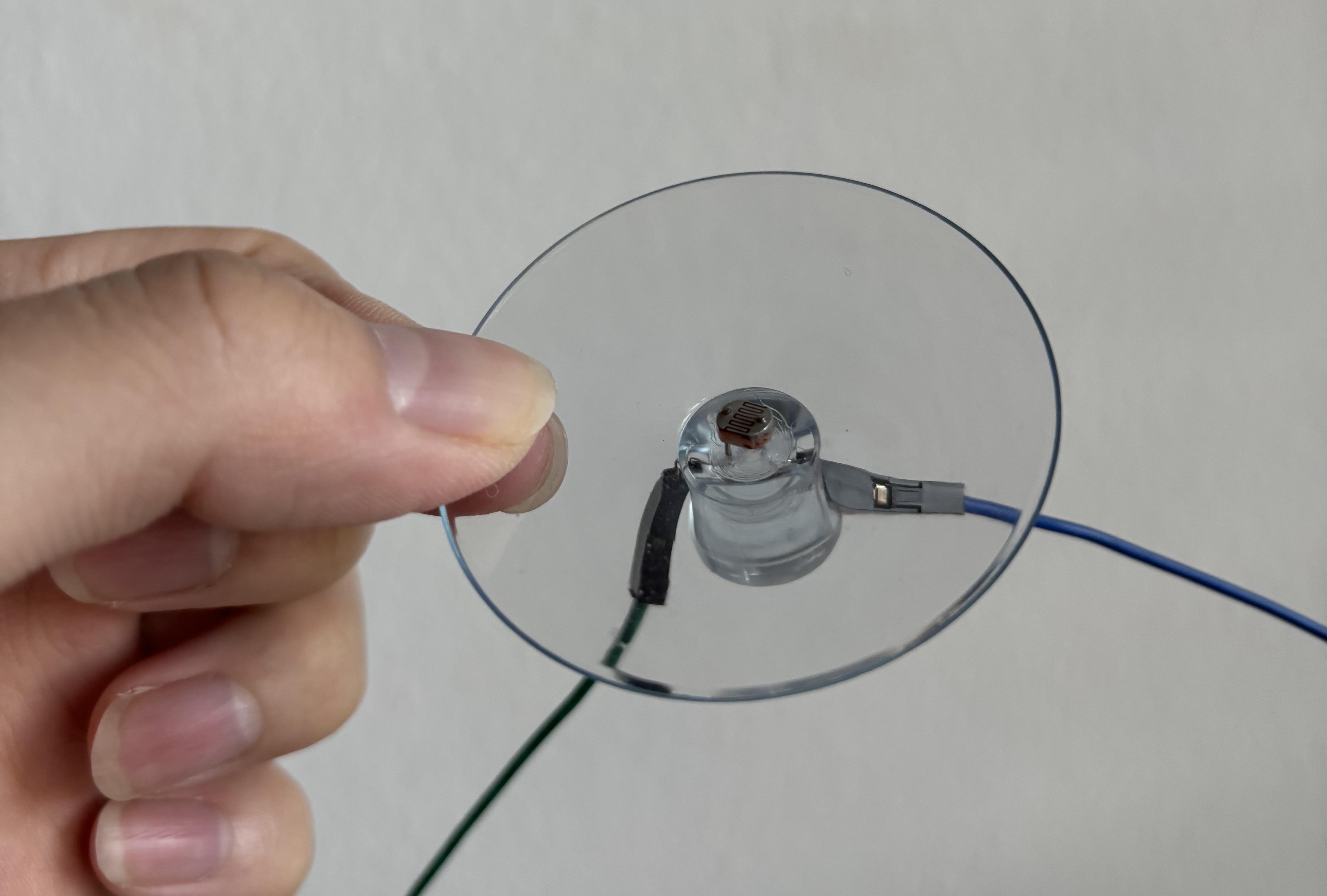
Suction Cup + LDR Light Sensor stucked to a screen
Week 13: Feedback & Reflection
This week has been a lot. The feedback was to find a way to bring all my prototypes together. I am thinking if these technology-enabled interactions should be categorised by the primarily senses involved or just simply their main output, such as (1) Visual, (2) Tactile, etc.