
Week 2 : Curate, Organise and Plan
Based on last week's feedback, this week I focused on curating my past experiments - which then gave me some ideas into how I could implement into a final prototype. The follow sections show how I curated my experiments, and some visualisations of final prototype.
Part ①: Curating My Experiments
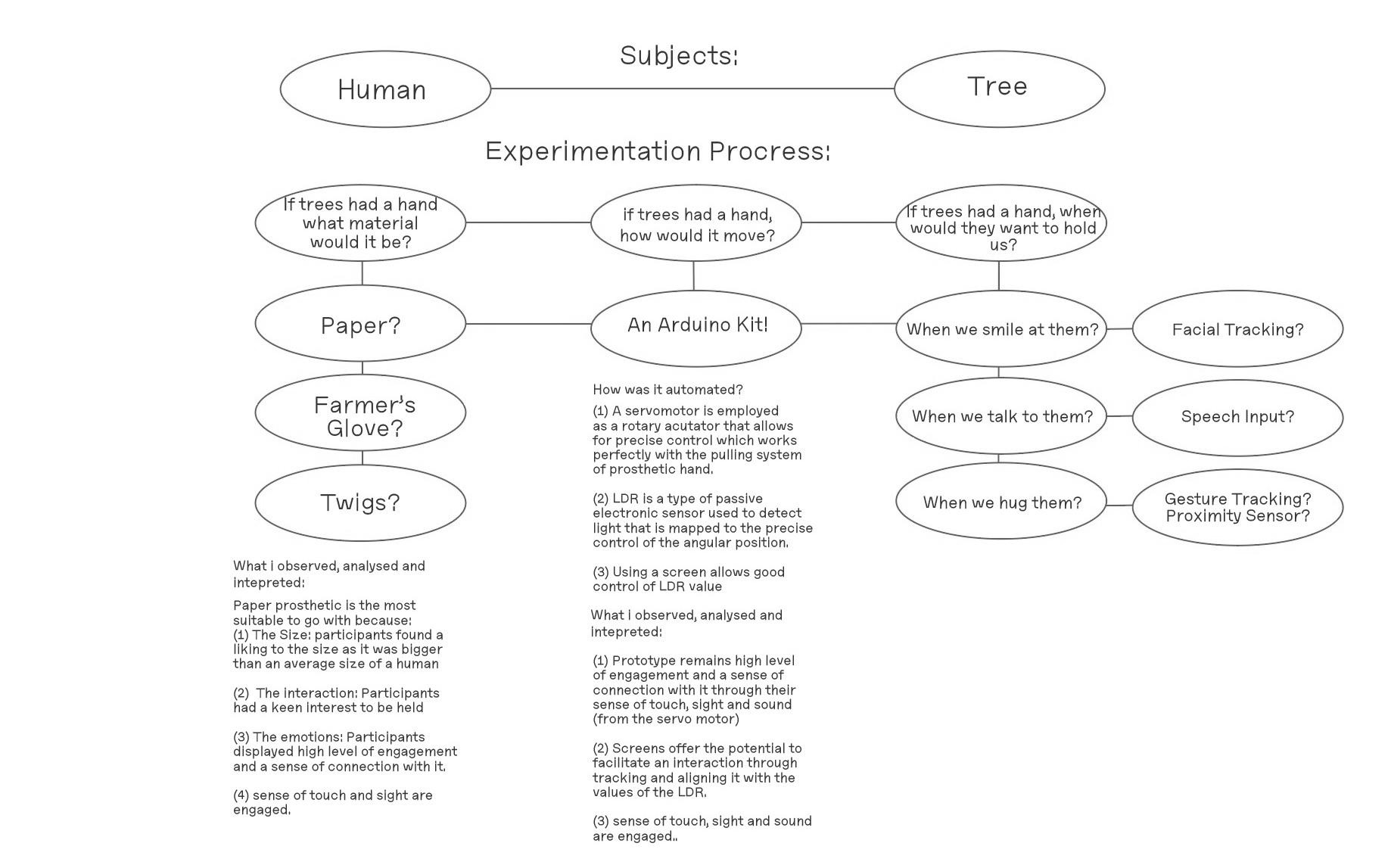
Motivated by the need to communicate my process clearly, I created a mind map to outline my creative journey through simple "What if?" questions. For example: What if trees had hands? What material would they be made of? Twigs? A farmer’s glove? Paper? Then, what if they could move—how would they? And so on.
Through this exercise, I was able to refine my numerous experiments to support the paper hand prototype, which originated from my Week 1 sketches depicting trees with hands. To move forward, I prompted myself with three additional experimental questions:If trees had hands, when would they want to hold us?
-
Roadmap to Dreaming of an Interspecies Sensor Week 2 Presentation Slide

hugging trees?

smiling at trees?

talking to trees?
Part ② : Designing the Prosthetic Construction Plan
Since paper prosthetics are the most practical option right now, I will work with their limitations while exploring their possibilities. Paper is lightweight, easy to get, and flexible, making it a great material for early designs. Although it isn’t as durable as other materials, its flexibility allows for quick changes and creative ideas.
By using paper, I can focus on improving the design and appearance of the prosthetic without being held back by complicated building processes. This method will also encourage a fun and relaxed exploration of shape and function, setting the stage for future designs in stronger materials.
-
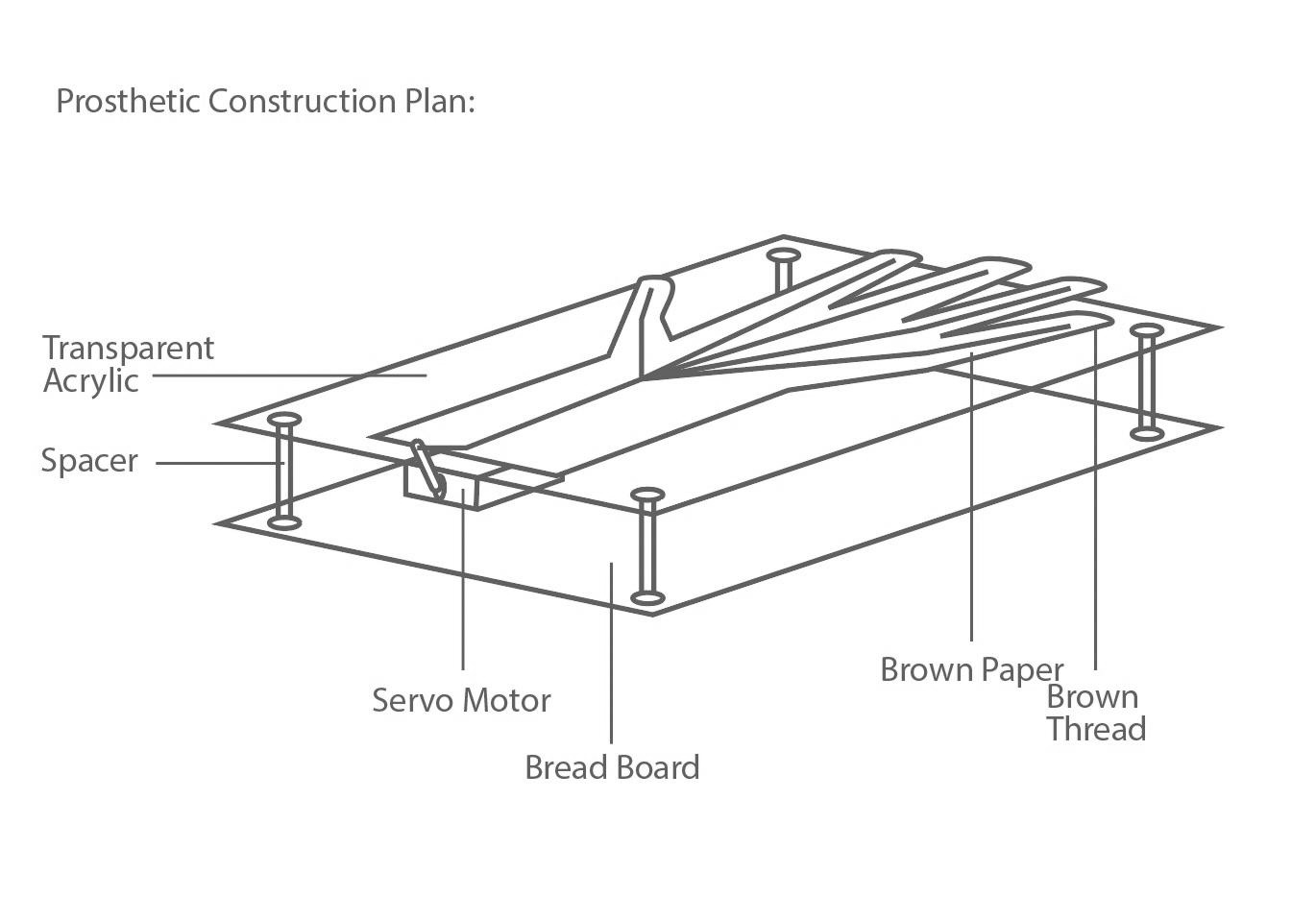
Construction Plan for A Friendly Hand 23 Jan 2025
Part ③ : Visualising Potential Outcomes
I created three possible outcomes based on the roadmap. Each outcome is a visual representation that shows how the experience might develop, using insights from current experiments. These outcomes showcase different possibilities and highlight differences in form, interaction, and user engagement.
-
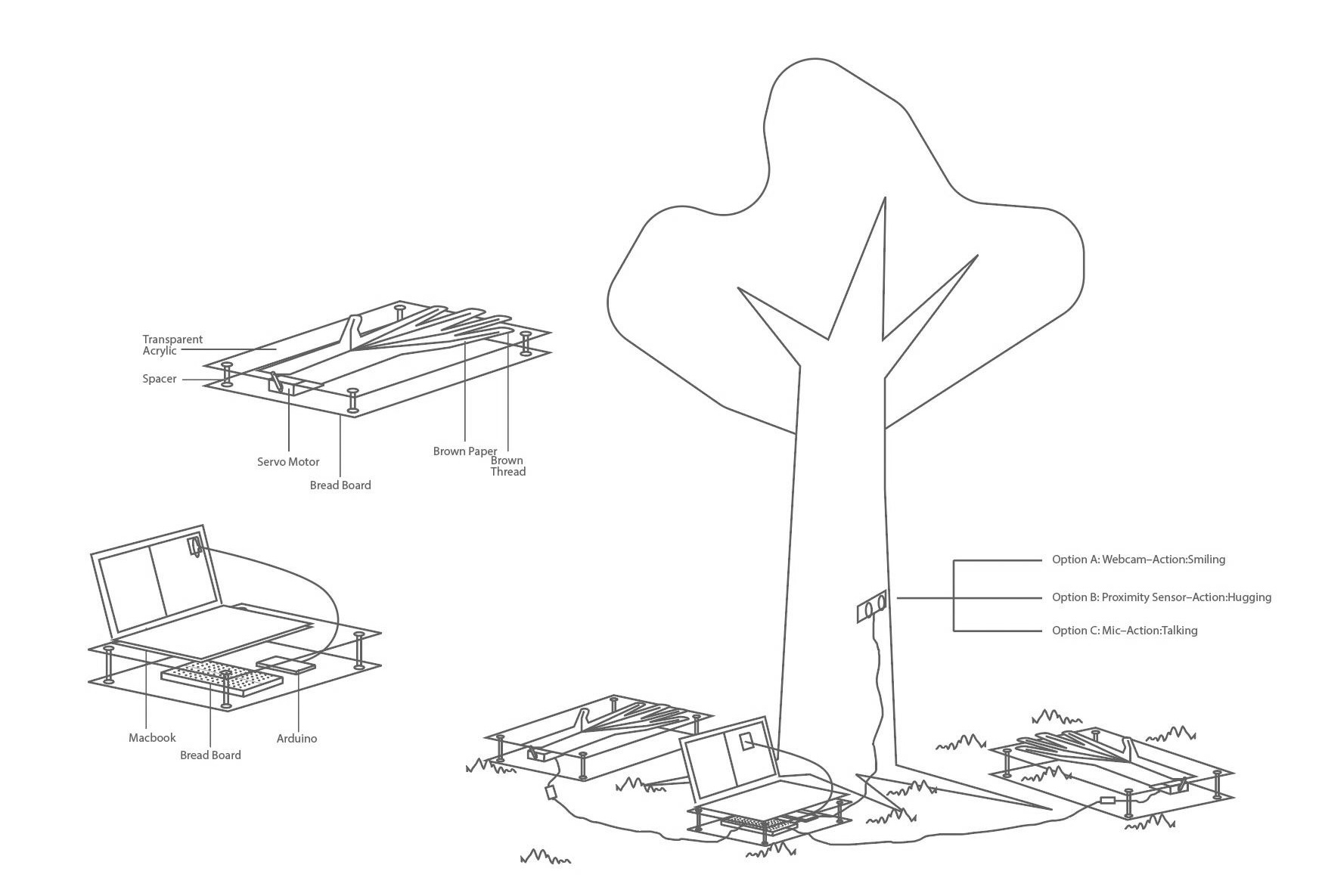
Set-up for Laptop, Set-up for Prosthetic, Set-up in Location (from left to right)
-
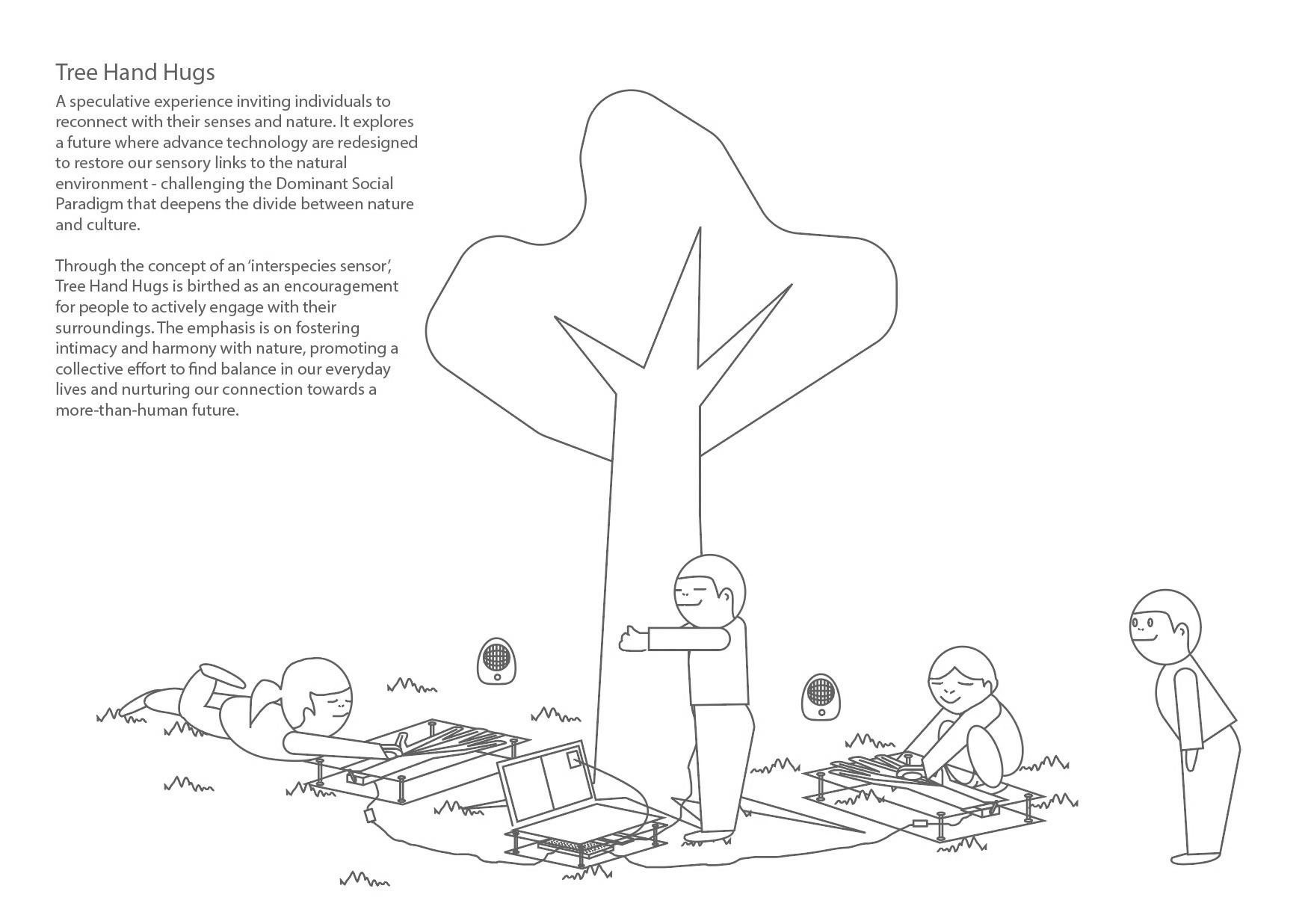
Visualiation 1 Collective Experience
-
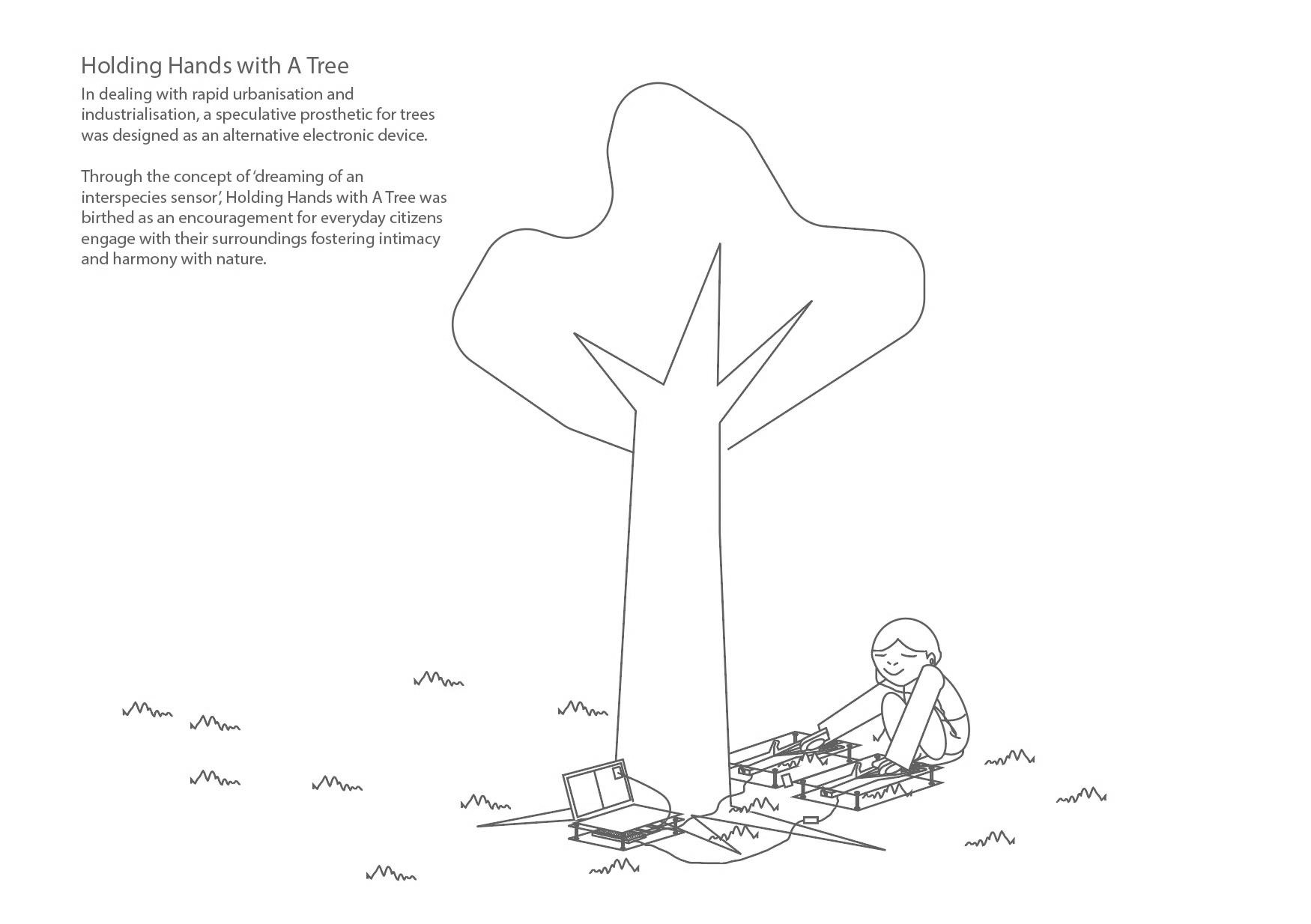
Visualisation 2 Individual Experience
Part ④ : Experimenting with Facial Tracking to Prosthetic
In the roadmap, the research asked, “If a tree had a hand, when would it want to hold us?” This question helped guide experiments with sensors and actuators to create a real interaction from this idea.
To start, I used p5.js code to track facial expressions. The goal was to take data from facial movements and use it to control the prosthetic. The prosthetic is linked to a micro servo, which reacts to changes in light with an LDR (light-dependent resistor) sensor.
The facial-tracking code produces values that connect to a rectangle in the p5.js sketch, changing from dark to light. As the rectangle brightens, the LDR sensor picks up the light change and moves the servo motor. This setup allows the prosthetic to respond to slight light changes caused by our facial expressions. It simulates an abstract "hand" gesture, representing how we imagine trees interacting with us.

100% Happy
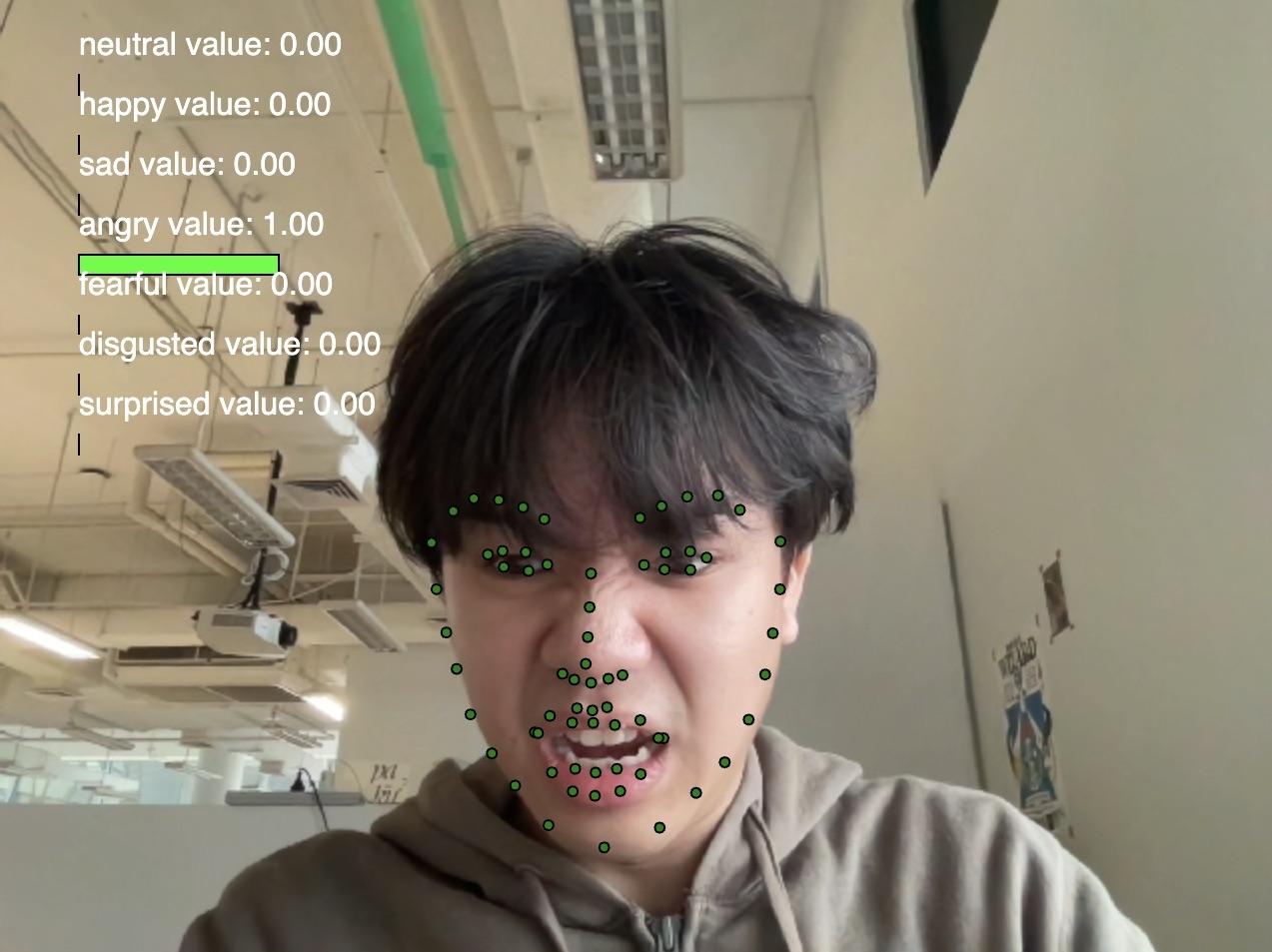
100% Angry

93% Digusted, 6% Sad - the remaining 1% couldn't be read
-
Facial-Tracking to Prosthetic Hand 5 Feb 2025
Week 2 : Feedback & Reflection
The feedback was helpful. The illustrations were well-received and made the atelier supervisor feel more at ease. I've realised that I need to be more practical and not dismiss my ideas and progress too quickly. I also need to start writing in clear and simple language. Since my project is already experimental, I should focus on basic prompts to guide audience. I have decided that my final presentation will include a video, a publication, and a prototype.